SLAM Introduction
the sparse map of SLAM

the dense map of SLAM

Cylinder Block Model
a Cylinder block model has six degree of freedom, rotation has three and translation has three. which can be described as follow.
Pinhole Camera Model
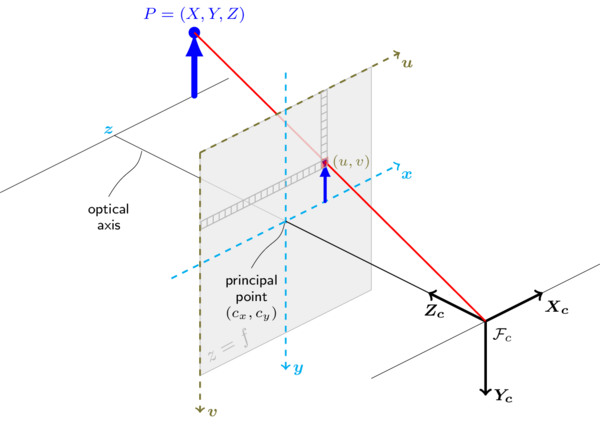 a pinhole camera coordinate can be described as follow
a pinhole camera coordinate can be described as follow